Product Interaction Tictag Internship
Last updated: Aug 1, 2025
Overview
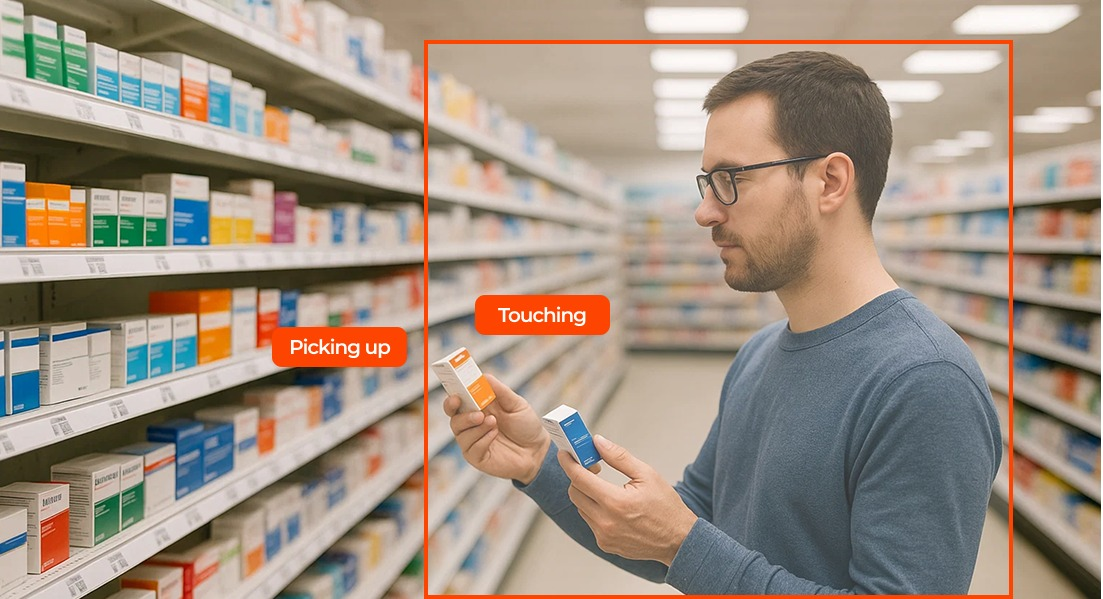
This was the main project of my Tictag internship: a computer vision pipeline that watches retail CCTV footage and figures out, for each shopper, when they actually interacted with a product on a shelf and whether they picked it up or put it back.
The reason it’s harder than it sounds is that motion detection alone is useless in a retail aisle. People walk past shelves constantly. The signal we care about is the moment a shopper’s hand reaches into a specific region of the shelf and a product physically changes. Catching that, on monocular angled CCTV, with crowding and occlusion, was the actual problem.
What it does, end to end
- Detects every person in the frame from a fixed overhead or angled camera.
- Figures out which shelf region (ROI) each person is interacting with.
- Classifies whether they added or removed an item.
- Outputs the event stream for downstream retail analytics, without needing any extra sensors on the shelf.
How It Works
To accurately detect product interaction events in retail CCTV footage, we developed a multi-stage vision pipeline that combines object detection, pose estimation, spatial classification, segmentation, frame differencing, and depth analysis.
1. Person Detection
- Model:
PekingU/rtdetr_r50vd_coco_o365 - We use RF-DETR, a transformer-based object detector, to detect all human figures in the frame.
- This lightweight and efficient detector offers reliable bounding boxes for tracking individuals in crowded environments.
2. Pose Estimation
- Model:
usyd-community/vitpose-plus-huge - For each detected person, we run ViTPose to extract 17 body keypoints, including wrists, elbows, shoulders, and more.
- Each keypoint includes a (x, y) coordinate and a confidence score.
- These keypoints are used to infer body pose and the directionality of arm movement, crucial for detecting interactions.
3. Interaction Classification
- Model: Custom XGBoost classifier
- We calculate the normalized relative distance between each keypoint and the center of each predefined ROI.
- These relative features help the model learn spatial interaction patterns, independent of camera position and frame resolution.
- The XGBoost model then predicts which (if any) ROI the person is likely interacting with in a given frame.
- This approach is distance-aware and allows classification of interaction even in cases where arm contact is ambiguous.
4. Body Segmentation
- Model:
yolov11m-seg - To avoid false positives from moving limbs, we segment out the person’s body inside each ROI.
- This ensures that subsequent change detection steps are only sensitive to object-level changes, not body motion.
5. Frame Differencing
- Technique: OpenCV’s BackgroundSubtractorMOG
- We use background subtraction on cropped ROI patches before and after the predicted interaction to detect pixel-level changes.
- If significant visual change is detected, we confirm that an interaction indeed altered the scene.
6. Depth Estimation
- Model:
Intel/dpt-large - To distinguish between adding vs removing a product, we estimate monocular depth using a DPT model.
- For example:
- If the average depth in the ROI increases, it suggests a product was removed (background revealed).
- If the average depth decreases, it suggests a product was added (foreground occlusion).
- This adds a 3D-awareness component to an otherwise 2D pipeline.
This hybrid rule-based and learning-based system enables fine-grained analysis of retail interactions—even under challenging conditions like crowding, occlusion, or suboptimal camera angles.
Challenges Faced
Building a reliable interaction detection system for retail CCTV analytics was far from straightforward. Some of the key challenges we faced include:
-
Occlusion:
Customers often block each other or key body parts, especially in crowded retail spaces, making person detection and pose estimation highly unreliable. -
Crowding and Overlap:
In dense environments, pose keypoints frequently overlapped or were misattributed, leading to confusion in tracking and interaction mapping. -
Non-Ideal CCTV Angles:
Most models (like ViTPose or YOLO) are trained on datasets with front-facing or side-view images. Retail CCTV footage typically comes from elevated, angled monocular cameras, resulting in reduced accuracy and distorted detections. -
Misclassification of Actions:
Standing near an ROI or casually moving an arm could be misclassified as an interaction, while real interactions were sometimes missed due to pose ambiguity. -
Inaccurate Depth from 2D:
With only monocular input, depth estimation was noisy. It was difficult to accurately determine if a hand was entering, hovering over, or leaving an ROI, leading to false positives or negatives. -
Pose Estimation Jitter:
Wrist and elbow points were especially noisy, fluctuating across frames and making interaction direction estimation unstable. -
Performance Bottlenecks:
Processing just 1 minute of video could take over 6 minutes on an NVIDIA A100 GPU, due to the heavy stack of models—person detection, pose estimation, segmentation, and depth inference all run frame-by-frame. This made real-time or near-real-time deployment infeasible without major optimization.
None of these went away. The pipeline we ended up with is a combination of vision models stacked with rule-based filters that catch each model’s worst failure modes. “Robust” is the wrong word; “useful, with known limitations” is closer to the truth.
Demo
🚫 Not Publicly Available
The system is currently used internally at Tictag and cannot be shared due to company policy. Please reach out for a private demonstration.
However, here’s a representative demo GIF showcasing the interaction detection in action:

Reflections
This was the first time I had to stitch a real perception pipeline together rather than treat each model as its own demo. Most of what I learned wasn’t about any single model; it was about how noise compounds. Every stage has its own failure modes, and by the time pose estimation passes a jittery wrist into the XGBoost classifier, which passes a borderline call into the depth estimator, the cumulative noise can swamp the signal. Half the work was figuring out where to insert sanity checks and where to lean on rule-based logic to catch the model when it was wrong.
It also made me appreciate why Tictag’s whole business model is human-in-the-loop annotation. The cleanest fix for most of the failure modes wasn’t a better model. It was a better-labelled corner case.
Models Used
- Person Detection:
PekingU/rtdetr_r50vd_coco_o365 - Pose Estimation:
usyd-community/vitpose-plus-huge - Segmentation:
yolov11m-seg - Depth Estimation:
Intel/dpt-large
Built With
- Python, OpenCV
- ONNX Runtime
- XGBoost
- Hugging Face Transformers
- Tictag’s custom annotation and video processing platform
Internship at Tictag
Tictag is a Singapore startup building hybrid AI/human data-labelling tools. I spent the internship embedded with their engineering and product teams, iterating on this pipeline. It was my first proper exposure to applied CV outside of a coursework setting, and the gap between a clean academic dataset and an actual angled CCTV stream from a real store is the part of the experience I think about most.